About Me
After working for three years as a field commissioning engineer with TMEIC, I decided to return to school to get my M.S. As a researcher at the Robotics and Mechatronics Lab at Virginia Tech, I had the opportunity to gain valuable knowledge and experience working with robotics, mechatronics, controls, and design.
My wife and I moved to Southern California, where I have had the opportunity to work on some fascinating technical challenges at both Adsys Controls and Kulicke & Soffa. At Adsys, I worked as a control engineer on high enery laser systems and designing computer vision algorithms. I am currently working at Kulicke & Soffa in their ultrasonic group, using Python to automate our testing and performing analysis on next-gen ultasonic transducer designs.
I love the challenge of being faced with a difficult problem and coming up with a clever and creative engineering solution, from my field engineering days to my research experience. There is no better feeling than seeing your efforts result in a process line starting up again, or a robot starting to move or a pattern begin to emerge from your analysis.
Experiences
In the ultrasonic group at Kulicke and Soffa, I lead the development of Python software used to measure, characterize, and analyze ultrasonic transducer performance in an automated test. My tools are used at our production site, and I have leveraged the data collected by my software to perform statistical analysis on new designs. I have presented my analyses on transducers to internal upper level management as well as for critical customers' engineering decision makers. I have also developed algorithms for automatic paramter tuning used in our ultrasonic generators, and designed a novel sensor that can be used to more accurately measure the performance of an ultrasonic transducer.
While at Adsys Controls, I was the lead controls engineer for several interesting projects. I worked to build a state space model of a complex optical system in Simulink, while on the side built a custom ray tracing program in order to design a non-axisymmetric optic. After that, I led the development of an algorithm for detecting and tracking drones from a moving platform, incorporating inertial feedback as well as optical input. That project was the first time I used Python in a professional sense, and was a great crash course in developing reusable, human-readable, efficient code.
As a graduate research assistant, I was responsible for conducting rigorous robotics research with the ultimate goal of publishing my work in peer-reviewed conferences and journals. This research was conducted both individually as well as in teams. Personally, I felt I was most successful working in large and small teams, as I enjoy talking through ideas because not only do team members have excellent suggestions and strategies, but also talking out an idea helps me think it through more clearly myself!
My role as a field engineer was both to set up, troubleshoot, and perform application-specific tuning for medium-voltage hardware as well as to diagnose and repair problems in already installed systems. After working for my first 6 months in Level I steel mill automation, I transitioned to working on variable frequency drives (VFDs). I spent time all over the world commissioning drives for all kinds of motor control applications. While it was a high-pressure job, especially showing up to a site when the manager immediately informing you the plant is losing tens of thousands dollars during the outage, the feeling after fixing the problem was extremely rewarding.
After being awarded a Pratt Undergraduate Research Fellowhship, I performed materials science and hydrodynamics research at uPhyl. During my time in the lab, I investigated the action of water droplets on the wing of the lacewing insect. I discovered a novel phenomenon in the manner in which droplet coalesced and "jumped" from the hairy fibers covering the wing, and replicated it with synthetic fibers. The work eventually resulted in a publication in Physical Review Letters.
Publications
K. Zhang, F. Liu, A. Williams., X. Qu, J. Feng, C.H. Chen, Self-Propelled Droplet Removal from Hydrophobic Fiber-Based Coalescers Physical Review Letters, Vol. 115, 14 August, 2015. Reported in Physics
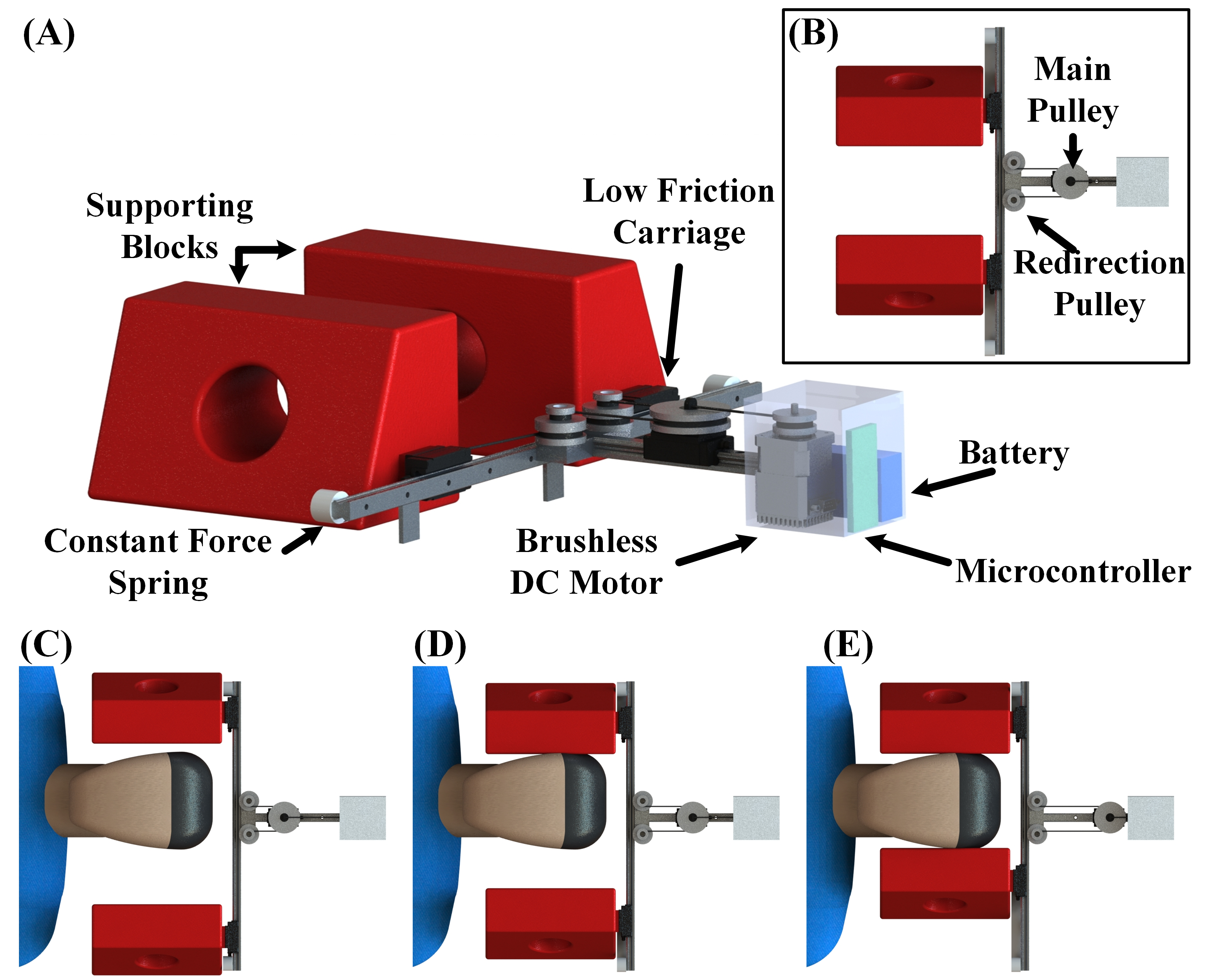
A. Williams, W. Saab, P. Ben-Tzvi, Analysis of Differential Mechanisms for a Robotic Head Stabilization System , Proceedings of the 2017 ASME IDETC/CIE, 41st Mechanisms & Robotics Conference, Cleveland, Ohio, Aug. 6-9, 2017.
B. Sebastian, A. Williams, P. Ben-Tzvi, "Control of a Head Stabilization System for Use in Robotic Disaster Response" , Proceedings of the 2017 ASME International Mechanical Engineering Congress and Exposition (IMECE 2017), Tampa, Florida, Nov. 3-9, 2017.
Projects
Here are a few of the projects I have worked on in the lab, at home , or in my career
 |
 |
 |
 |
 |
 |
 |
 |